全国咨询热线:
全国咨询热线:
+86 158-1184-4241
全国咨询热线:
+86 158-1184-4241
Product center
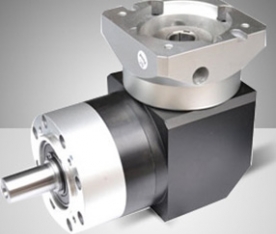
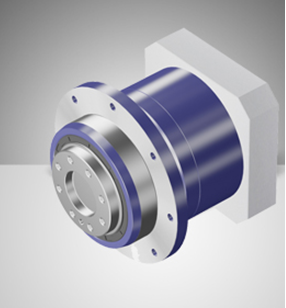
ZPLE系列精密行星减速机

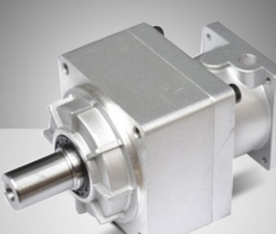
ZPT系列行星减速机
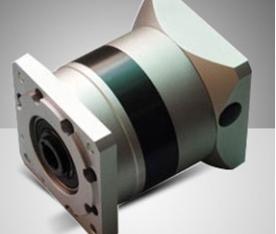
VLF078系列精密行星减速机
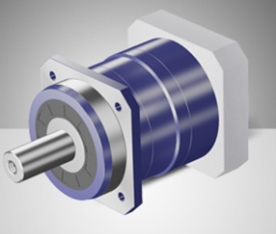
PLFK系列行星减速机

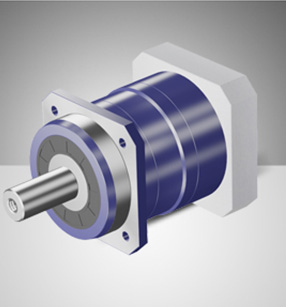
ZPLF系列精密行星减速机

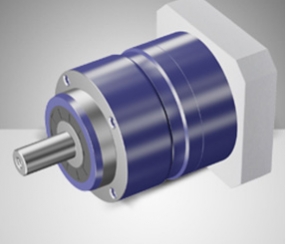
PLE系列精密行星减速机
AF系列精密行星减速机

PLF系列精密行星减速机
Contact us

首页
发布时间:2019-11-04 阅读量:
机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。下面鹏辉科技小编就来和大家说说有关机械手应用行星减速机的案例特点。
机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
控制系统
机械手控制的要素包括工作顺序、到达位置、动作时间、运动速度、加减速度等。机械手的控制分为点位控制和连续轨迹控制两种。控制系统可根据动作的要求,设计采用数字顺序控制。它首先要编制程序加以存储,然后再根据规定的程序,控制机械手进行工作程序的存储方式有分离存储和集中存储两种。分离存储是将各种控制因素的信息分别存储于两种以上的存储装置中,如顺序信息存储于插销板、凸轮转鼓、穿孔带内;位置信息存储于时间继电器、定速回转鼓等;集中存储是将各种控制因素的信息全部存储于一种存储装置内,如磁带、磁鼓等。这种方式使用于顺序、位置、时间、速度等必须同时控制的场合,即连续控制的情况下使用。
优势
机械手可以减省工人、提高效率、降低成本、提高产品品质、安全性好、提升工厂形象。
多关节机械手的优点是:动作灵活、运动惯性小、通用性强、能抓取靠近机座的工件,并能绕过机体和工作机械之间的障碍物进行工作.随着生产的需要,对多关节手臂的灵活性,定位精度及作业空间等提出越来越高的要求。多关节手臂也突破了传统的概念,其关节数量可以从三个到十几个甚至更多,其外形也不局限于像人的手臂,而根据不同的场合有所变化,多关节手臂的优良性能是单关节机械手所不能比拟的
伺服行星减速机一般用于低转速大扭矩的传动设备,把电动机、内燃机或其它高速运转的动力通过减速机的输入轴上的齿数少的齿轮啮合输出轴上的大齿轮来达到减速的目的,普通的减速机也会有几对相同原理齿轮达到理想的减速效果,大小齿轮的齿数之比,就是传动比。